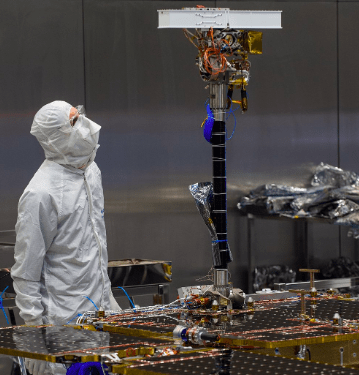
One of the key instruments on the European Space Agency’s (ESA) ExoMars rover, the Panoramic Camera (PanCam) has been fitted and integrated in the Airbus bio-burden cleanroom in Stevenage.
Designed and built by University College London’s Mullard Space Science Laboratory (MSSL) in an international partnership, and including the High Resolution Camera provided by DLR, the PanCam will be the scientific eyes of the rover when it lands on Mars in spring 2021.
The high resolution camera will take 3D images to be used by the autonomous navigation system on the rover. Images will be sent back to the Rover Operation Control Center for the scientific team to choose a location and then the rover, Rosalind Franklin, will determine its own safe path to travel there. The PanCam will also give textural information for example, laminations or pitting, which could be related to the presence of organisms.
The PanCam will also observe atmospheric phenomena such as Mars’ famous dust devils and water in the atmosphere.
Colin Paynter, Managing Director of Airbus Defence and Space UK said: “ExoMars is Europe’s latest flagship space mission and Airbus is at the heart of it. Today’s installation in Stevenage of the powerful PanCam, which will not only provide 3D images of the Martian landscape but also data on the atmosphere, is a major milestone as we move forward to the rover being ready to fly in July 2020.”
The PanCam consists of three cameras. Two wide angle cameras will take panoramic images, and a filter wheel enables them to image in 12 different wavelengths. A high resolution camera will image in full colour. Included on the rover is a Rover Inspection Mirror which will allow the PanCam to image parts of the rover not directly in its field of view to allow the status of the rover to be monitored.
The ExoMars rover Rosalind Franklin will be Europe’s first planetary rover and is being assembled at Airbus in Stevenage. It will search for signs of past or present life on Mars and is equipped with a 2m drill to take samples from below the surface where they will have been protected from the harsh radiation environment.
The rover features nine instruments which will help scientists conduct a step-by-step exploration of Mars, from a panoramic scale and progressively converging to smaller (sub-millimetre) studies, concluding with the molecular identification of organic compounds. The rover is equipped with an autonomous navigation system developed by Airbus which will enable it to travel between sites of interest much more quickly than by being driven remotely in real time from Earth.
Rosalind Franklin is in the final stages of integration in the cleanroom in Stevenage. The instruments have been fitted inside the rover’s “bathtub” and the top deck with solar arrays has been installed. The rover’s drill is also in place – with testing due to take place in the next few weeks. After completion at Stevenage the rover will be shipped to Airbus in Toulouse for a programme of environmental testing to prepare it for launch.
Malaysian defense company, Deftech, displayed a range of unmanned aerial vehicles (UAVs) intheir booth during the DSA 2022 expo. The…
Airbus has performed a first A380 flight powered by 100% Sustainable Aviation Fuel (SAF). Airbus’ A380 test aircraft MSN 1…
Cargojet has entered into a five-year strategic agreement with DHL, with a renewal option for an additional two years, to…
The Icelandic airline Eagle Air and the German aircraft manufacturer Deutsche Aircraft have announced a renewal of their support contract…
Hindustan Aeronautics Limited (HAL) has signed an Memorandum of Understanding (MoU) with UPNM Malaysia for collaboration and training of faculty…
Meopta is displaying a wide range of military-grade optical gun sights, scopes, and night vision equipment at the Defense Services…
After signing a Memorandum of Understanding (MoU) with Malaysia’s G7 Aerospace at DSA 2022 event on Monday (Mar. 28), Infoglobal…
Insight Atlantic, a Malaysian defense equipment supplier, is displaying a range of made-in Germany, Lowa tactical footwear in its booth…
PAL Aerospace and Thales have signed an agreement to jointly develop the next generation of mission system during the DSA…
Airod Techno Power (ATP) signed a Memorandum of Understanding (MoU) with Honeywell International to provide Maintenance, Repair, and Overhaul (MRO)…
Advanced Defence Systems (ADS) has signed an MoU with Nexter on the third day of the DSA 2022 event, Wednesday…
In a public announcement released by the Malaysian Ministry of Defence (MINDEF) on Wednesday (Mar. 30), there have been 54…
Sikorsky and Boeing on Thursday announced six new members, including Magnaghi Aeronautica and Collins Aerospace, of Team DEFIANT. The suppliers…
MA Group will provide the fully integrated landing gear system for the DEFIANT X helicopter, consisting of the nose and…
After spending about US$7.4 million on the project, the Australian government has cancelled its Project Air 7003, a program that…
AerCap has signed lease agreements for ten new Airbus A320neo aircraft and two new Airbus A330neo aircraft with ITA Airways.…
A routine service test for an Emirates Airbus A380 aircraft on April 1 has ended with a surprising result. …
Malaysia-based DefTech and Iveco Defence Vehicles are joining hands to establish an authorised MRO centre for Iveco Defence Vehicles trucks…
General Atomics-Aeronautical Systems, Inc. (GA-ASI) has begun the first installation of factory upgrades to a Gray Eagle-Extended Range (GE-ER) Unmanned…
FL Technics has launched a dedicated business line for wheels and brakes maintenance and opened a specialized shop at the…
ScioTeq has launched RDU-4208 LAD, its new full redundant Large Area Display (LAD) that can be deployed in new cockpits…
Etihad Airways, on March 31st., 2022, unveiled its new Airbus A350-1000, registration A6-XWB, on a special inaugural commercial flight from…
RGA-Black Stone Airlines, a newcomer in the Indonesian aviation business, officially started its business in the country after having its…
SIA Engineering Company Limited (SIAEC) announced that it has signed a non-binding Memorandum of Understanding (MoU) with Impeccable Vintage Properties…
Honeywell has signed separate MOUs with Malaysian firms Airod Techno Power (ATP) and Galaxy Aerospace that will further strengthen the…
AirAsia has announced that it will resume international flights from India to Malaysia and Thailand. Flights are now available from…
Embraer and the Brazilian Army have inked a contract to develop and implement Phase Two of the Army's Strategic Program…
The Philippine Air Force (PAF) officially inducted two Turkish-made T129B ATAK attack helicopters and an Airbus Defense and Space C-295…
General Atomics Aeronautical Systems, Inc. (GA-ASI) has been selected to support the Japan Coast Guard's (JCG) RPAS Project. Operations will…
The Royal Thai Navy (RTN) S26T submarine acquisition project from China is at risk of cancellation due to Germany’s refusal…
Headquartered in Singapore with reporters spread across all major regions, GBP Aerospace & Defence is a leading media house that publishes three publications that serve the aerospace and defence sector - Asian Defence Technology, Asian Airlines & Aerospace and Daily News. Known industry-wide for quality journalism, GBP Aerospace & Defence is present at more international tradeshows and exhibitions than any other competing publication in the region.
For over three decades, our award-winning team of reporters has been producing top-notch content to help readers stay abreast of the latest developements in the field of commercial aviation, MRO, defence, and Space.
Copyright 2023. GBP. All Rights Reserved.
Home Defence & Security Space Commercial Aviation Maintence Repair & Overhaul Daily News Events About Us
2024 GBP all rights reserved.